起止时间:09/2025 ~ 12/2025
技术栈:[ROS2, TurtleBot3, V2A, SLAM, Cartographer, Nav2, LIDAR, Arduino, Raspberry Pi, 自动导航, 路径规划, 视觉定位]
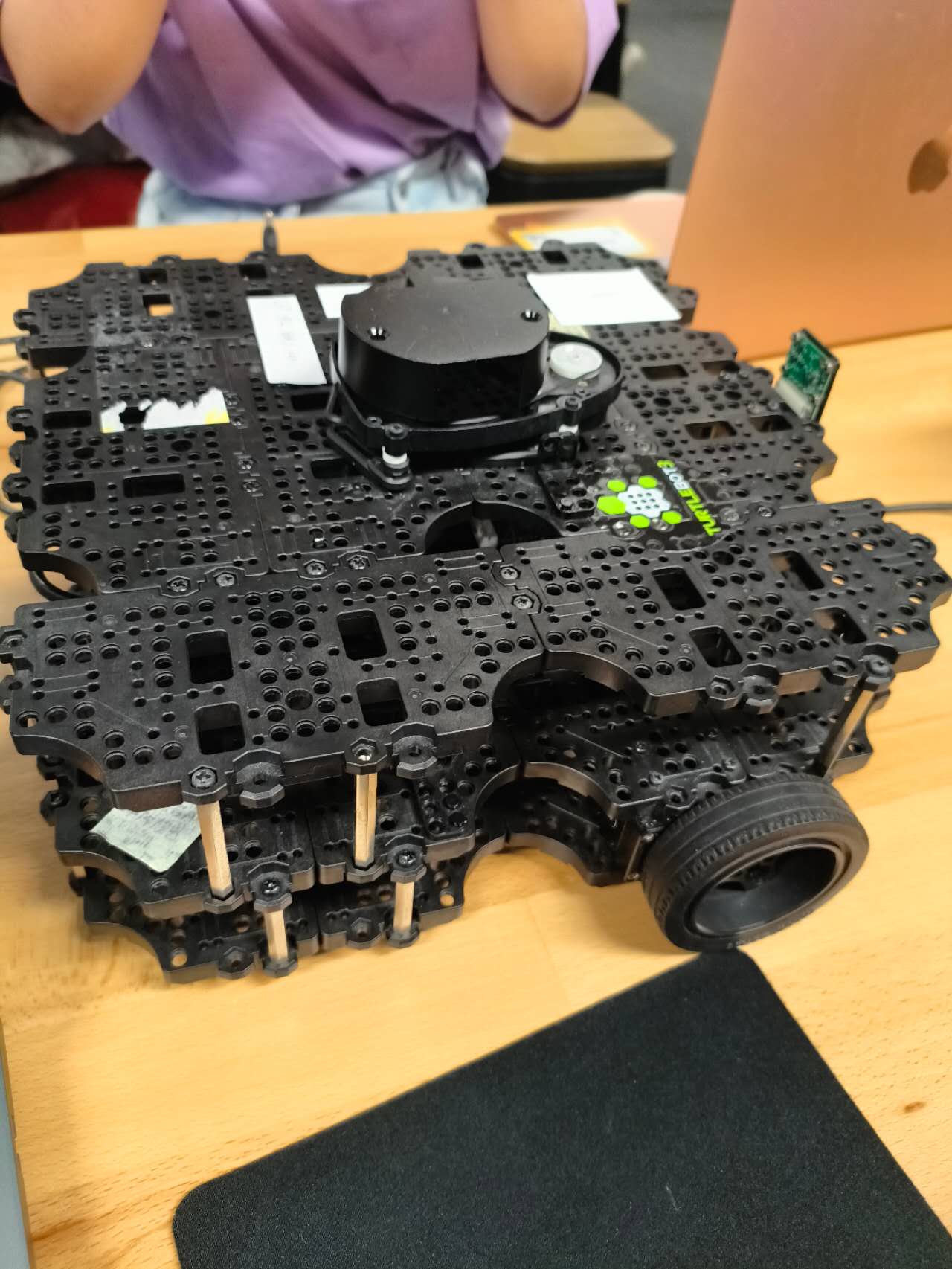
设计并实现基于 ROS2 框架的自主导航机器人系统,部署于 TurtleBot3 平台,融合 LIDAR 激光雷达 实现环境感知与自主避障。系统采用 V2A(Virtual to Action) 左向优先探索策略,实时计算 12 向激光距离向量,动态调节线速度与角速度,实现沿墙稳定行进与障碍规避。
基于 SLAM(Simultaneous Localization and Mapping) 与 Cartographer 构建环境地图,结合 Nav2 导航栈完成路径规划与闭环定位。系统通过 ROS2 多节点架构 实现模块化通信:感知节点进行激光与视觉信息融合,控制节点执行运动控制与路径跟踪。
在硬件层面,系统集成 Arduino(底盘与传感器采集)与 Raspberry Pi(高层路径规划与视觉识别),并结合 视觉标识识别(RGB-D Camera) 辅助地标定位,实现从传感器采集、决策规划到运动执行的完整自主导航闭环。
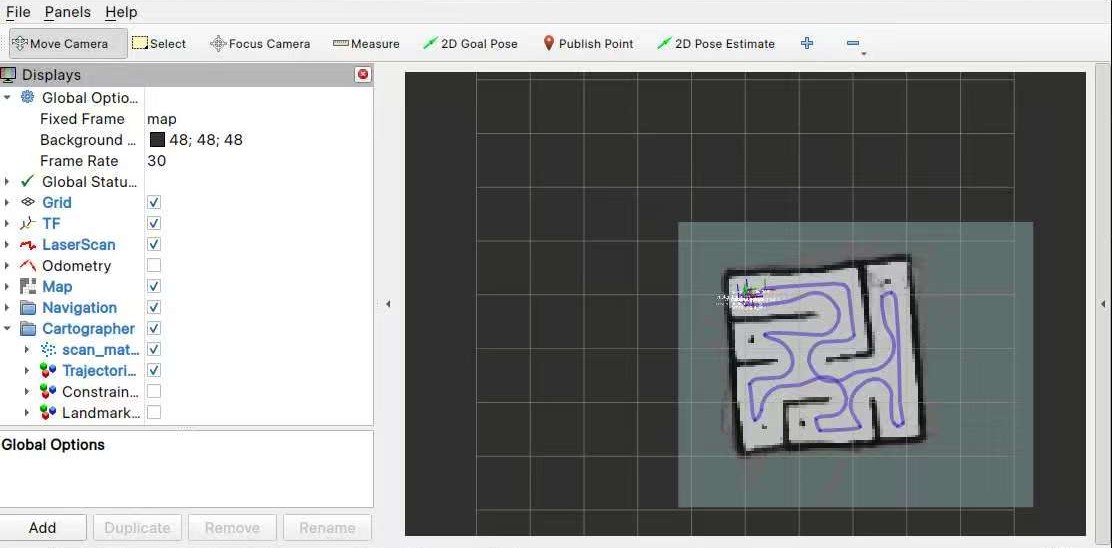 自主构建图
自主构建图
- 本文链接: https://jinhongcai.work/2025/10/24/robotics/wall_follower/
- 版权声明: 本博客所有文章除特别声明外,均默认采用 CC BY-NC-SA 4.0 许可协议。